2026美加墨世界杯(中国) ICRA 2026 | 首个 36 解放度双臂聪惠操作 VLA 模子, 开源!


同期扶助双臂协同、双聪惠手高解放度致密操作
——端到端VLA模子
过往主流VLA系统,要么聚焦双臂低解放度夹爪为止,要么专攻单臂高解放度聪惠手操作,弥远无法兼顾双臂协同与致密手指动作的双重需求。
比如活塞插入需双臂精确协作,拧瓶盖、致密取物则依赖多指无邪调控,这类任务持久缺少斡旋的VLA处罚有谋略。
近日,首个原生面向双臂双高解放度(36解放度)聪惠操作的开源VLA模子:Dexora,突破此前VLA的方式壁垒,为通用聪惠机器东说念主的落地提供了全新范式。

硬件与遥操作:虚实协同的聪惠数据底座
高解放度聪惠操作的中枢前提,是精确、可领域化的数据集聚。Dexora放手单一遥操作有谋略,打造“外骨骼+VR”夹杂遥操作系统,同期驱动物理机器东说念主与MuJoCo数字孪生,从根源处罚数据集聚的精度与领域贫困。

▲Dex硬件与夹杂遥操作系统暗示图©[深蓝具身智能]编译
可竣事扭转、捏取等类东说念主致密操作,整套系统筹谋36解放度,为复杂双手协同任务提供硬件基础。
定制外骨骼背包捕捉机械臂举座清楚(无漂移、低延伸),AppleVisionPro竣事无象征手指跟踪,兼顾手臂大范围移动的踏实性与手指致密动作的无邪性。
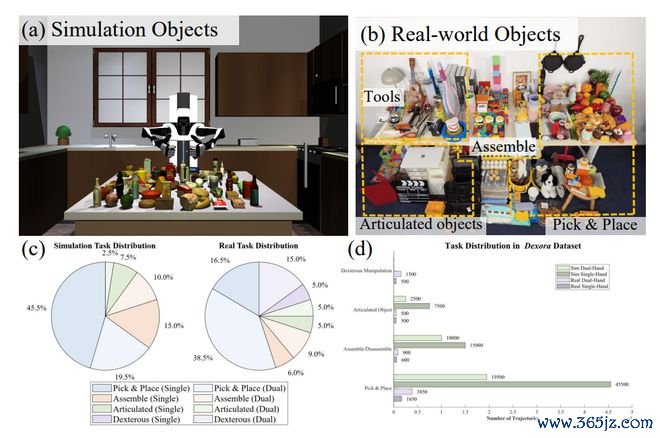
▲仿真/真确数据集物体与任务散播暗示图©[深蓝具身智能]编译
更过失的是虚实同步想象:
遥操作教唆同期下发物理机器东说念主与数字孪生,两者传感器数据(4路RGB、36解放度要津景色)20Hz同步纪录。
既保险真确场景数据的真确性,又能在仿真中低老本膨胀任务场景,酿成“真确+仿真”互补的数据集。
最终构建的数据集包含10万条仿真轨迹(650万帧)、1万条真确遥操作轨迹(292万帧),掩盖30类仿真物体、17类真确物体,兼顾基础抓取与致密聪惠任务。

模子架构:扩散Transformer+质地判别器双中枢
Dexora基于数据质地感知的端到端VLA架构,通过扩散Transformer生成动作,搭配离线质地判别器过滤噪声数据,处罚遥操作数据质地杂乱不皆、高维动作磨练不踏实的行业痛点。
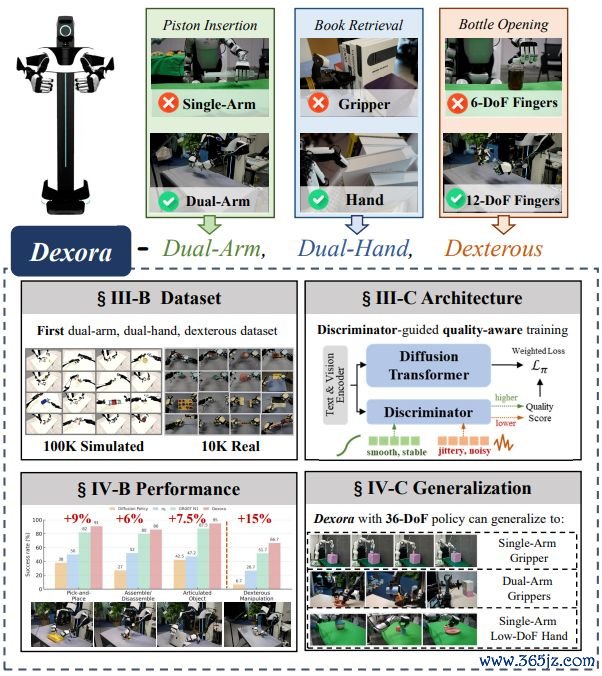
▲Dexora举座总览图(动机/数据/架构/性能/泛化)©[深蓝具身智能]编译
扩散Transformer政策集聚
接受解码器-only扩散Transformer看成政策中枢,输入多视角RGB图像、讲话教唆与面前要津景色,输出36解放度畅通动作序列。
模子接受T5编码讲话教唆、SigLip编码图像特征,瓜代注入Transformer块,通往时噪估计生成动作,兼顾多模态和会才气与高维动作建模精度。
数据质地判别器
遥操作数据常因操作谬误、传感器噪声存在低质地轨迹,平直磨练会拉低模子性能。
Dexora想象离线判别器,通过“清楚平滑度+任务生遵守”双重法子筛选数据:
判别器以冻结的预磨练政策为基准,估计轨迹质地得分(0-1),磨练时将得分鼎新为权重,高质地轨迹权重高、低质地轨迹权重低,公式简化为:
其中为质地权重,为估计噪声,为真确噪声。这种想象让模子聚焦有用数据,大幅进步高维聪惠动作的磨练踏实性。

磨练经过:三阶段渐进式优化
Dexora接受“仿真预磨练+判别器磨练+真确微调”三阶段磨练,均衡基础才气与聪惠手段,竣事从仿真到真确的平滑迁徙。
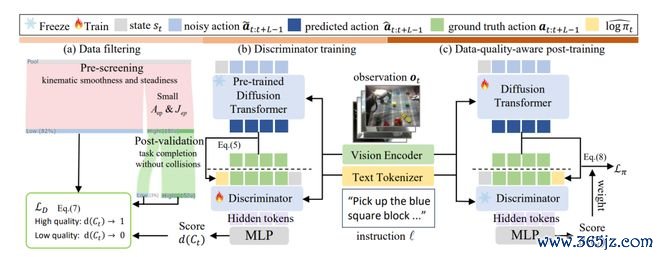
▲Dex数据过滤、判别器磨练、质地感知磨练框架图©[深蓝具身智能]编译
第一阶段,世界杯官方认证平台10万仿真轨迹预磨练,让模子掌捏抓取、拼装等基础操作,酿成最先动作生成才气;
第二阶段,用筛选后的高质地真确数据磨练判别器,使其精确识别轨迹优劣;
第三阶段,用一起真确数据微调政策,通过质地权重指导,让模子从基础才气进阶到拧瓶盖、致密取物等聪惠手段。

性能与泛化
执行驱散闪现,Dexora在基础任务、聪惠任务、跨方式泛化三大维度均竣事突破,考证了双臂双高解放度想象与质地感知磨练的有用性。

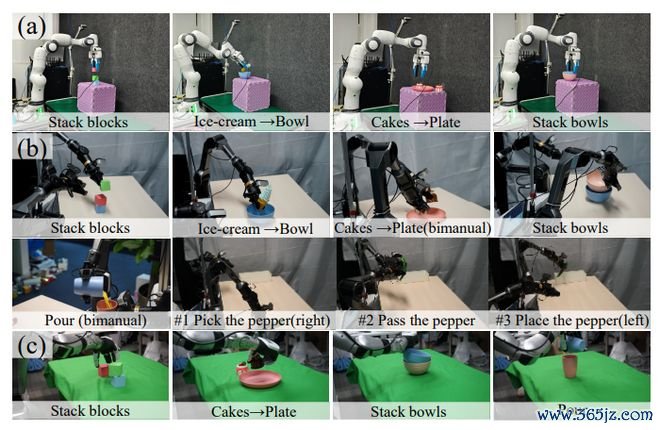
▲基础任务示例图©[深蓝具身智能]编译

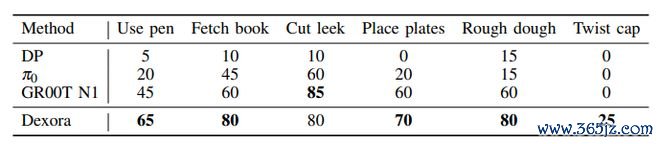
▲基础任务生遵守对比表©[深蓝具身智能]编译
平均生遵守达89.6%,12项任务中7项生遵守超90%,双臂协同任务(如双手递物、嵌套碗分歧)上风显赫,远超GR00TN1(82.1%)、π0(50.4%)等基线。
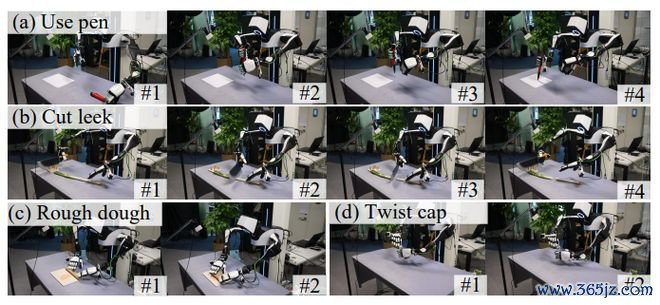
▲聪惠任务示例图©[深蓝具身智能]编译
▲聪惠任务生遵守对比表©[深蓝具身智能]编译
平均生遵守66.7%,较最优基线GR00TN1(51.7%)进步15个百分点,尤其在拧瓶盖、致密面团操作等需要双手协作+多指调控的任务中,基线实在失效,Dexora仍能踏实完成。
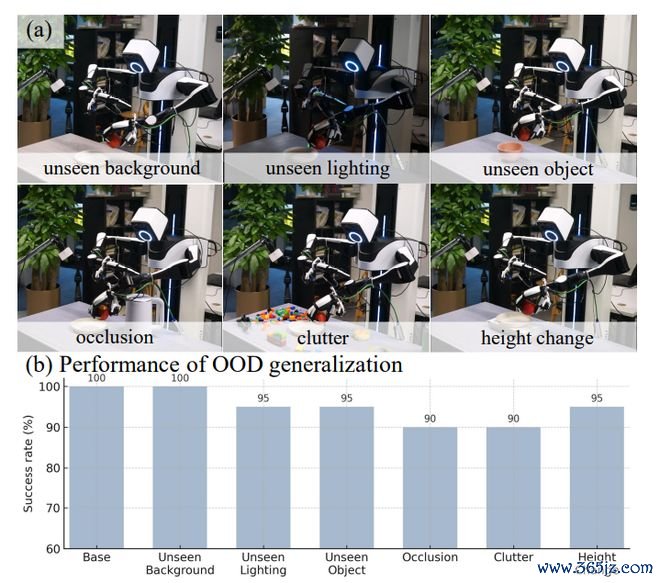
▲散播外泛化性能图©[深蓝具身智能]编译
一是散播外泛化,在未知布景、光照、物体、遮拦等场景下,生遵守仅小幅下落,鲁棒性强;
二是跨方式迁徙,36解放度模子可平直适配单臂夹爪、双臂夹爪、单臂低解放度手,无需再行磨练,仅需适配动作维度,突破VLA的方式依赖。
▲基础任务生遵守对比表©[深蓝具身智能]编译
消融实考证,质地判别器可缩小动作抖动,进步任务踏实性,证实“真确数据+质地感知”是聪惠VLA的中枢因素。
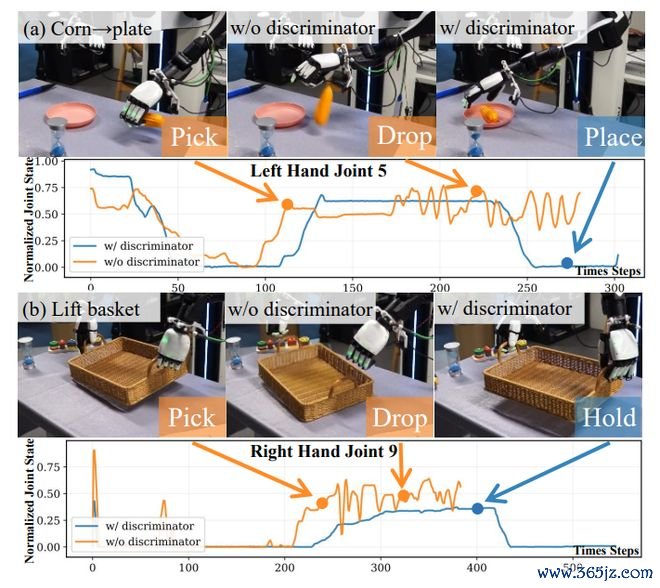
▲质地判别器后果对比轨迹图©[深蓝具身智能]编译

聪惠VLA:价值与局限并存
Dexora是首个原生双臂双高解放度VLA,证实高解放度模子可向下兼容低解放度开辟,为通用机器东说念主提供“高维磨练、低维部署”新念念路。
虚实协同集聚+质地感知磨练,处罚聪惠数据稀缺、噪声大的贫困,为高维VLA数据确立提供参考。
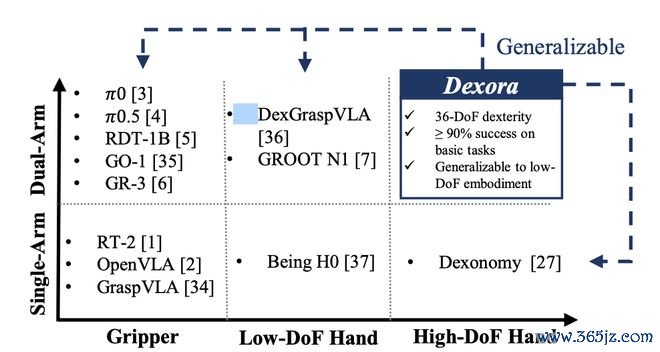
▲Dexora与主流VLA的方式掩盖对比图©[深蓝具身智能]编译
同期,存在的局限在于:
硬件依赖:36解放度系统老本高,难以快速普及,且无触觉反映,拧瓶盖等战斗敏锐任务生遵守仍低。
任务局限:复杂万古序任务(如多方法安设)、动态环境适宜才气不及。
泛化领域:跨材质、极点场景的踏实性有待进步。
过往VLA要么“能双手不致密”,要么“能致密不双手”。
Dexora初度将两者斡旋,用开源模式缩小门槛,为办事机器东说念主、工业聪惠操作等场景提供可行有谋略。
改日,若能和会触觉反映、强化万古序推理,Dexora有望进一步减弱与东说念主类操作的差距,鼓舞通用聪惠机器东说念主从执行室走向实质期骗。
Ref
论文标题:Dexora:Open-sourceVLAforHigh-DoFBimanualDexterity
论文作家:ZongzhengZhang2026美加墨世界杯(中国),JingruiPang,ZhuoYang,KunLi,MinwenLiao,SainingZhang,GuoxuanChi,JinbangGuo,Huan-angGao,ModiShi,DongyunGe,YaoMu,JiayuanGu,RuiChen,HaoDong,HuazheXu,LiYi,YixinZhu,HangZhao,PengweiWang,ShanghangZhang,GuocaiYao,JianyuChen,HongyangLi,HaoZhao